Jongann Lee
Jongann Lee
Home
Projects
Publications
Contact
CV
Light
Dark
Automatic
Reinforcement Learning, Quadrotor, Geometric Tracking Controller
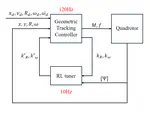
Reinforcement Learning based Tuner for the Geometric Tracking Attitude Controller
A reinforcement learning algorithm designed to tune the attitude controller gains for the geometric tracking controller for the quadrotor.
PDF
Code
Cite
×