Jongann Lee
Jongann Lee
Home
Projects
Publications
Contact
CV
Light
Dark
Automatic
Adaptive Control
Adaptive Quadrotor Controller
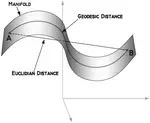
Created an adaptive quadrotor controller by using the geodesic distance of the manifold of physically consistent inertial parameters. The adaptive law was implemented to the geometric tracking controller to create the adaptive quadrotor controller.
PDF
Cite
×