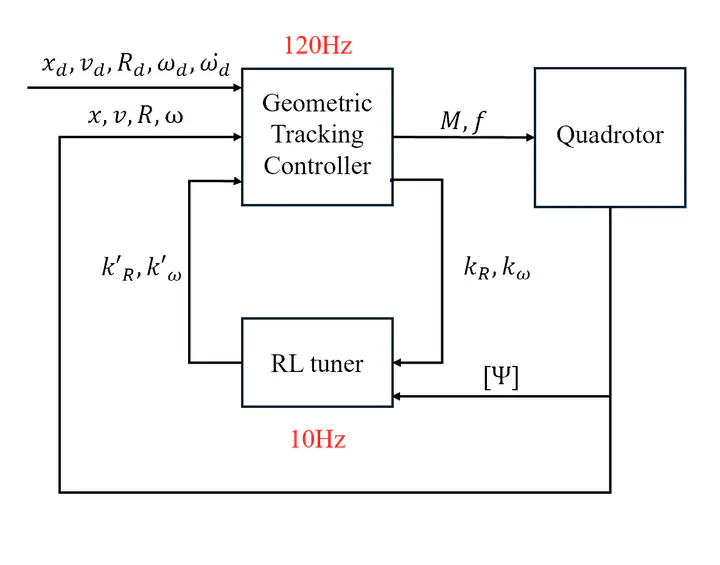
 Controller diagram of the RL tuner
Controller diagram of the RL tunerPID controllers are widely used across many applications including quadrotors. A variant of the PD controller is the geometric tracking controller, which utilizes the rotation matrix and the non-linear quadrotor dynamics. However, PID controllers require gain tuning, and their fixed gains render them incapable of responding to changes in the system in real-time. We propose a reinforcement learning based tuner for the attitude controller gains, which updates the gain in real time based on the history of the vehicle attitude error. The trained RL tuner is shown to be capable of stabilizing a vehicle with an unstable initial controller gain.
Jongann Lee
Aerospace Engineering Undergraduate Student
An undergraduate student at Seoul National University, studying aerospace engineering.