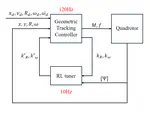
Augmented an existing PD controller for a unicycle by adding a disturbance observer inner loop, improving the performance by reducing the overshoot. Implemented and tested the controller in Matlab and Simulink, confirming the performance improvement.