Biography
Welcome to my webpage!
I’m an aerospace engineer with an inherent love for vehicles like aircraft, cars, and trains. Currently I’m interested mobile robotics, reinforcement learning, safety in control, and in a more general sense, autonomy.
I am currently pursuing an undergraduate degree in aerospace engineering at Seoul National University. There I conducted research on various novel controllers for autonomous aerial vehicles under the guidance of Professor Dongjun Lee. I was also president of the drone club Bulnabi, where I participated in the Korea robot aircraft competition.
Please feel free to reach out!
- Mobile Robotics
- Control Systems Engineering
- Reinforcement Learning
- Safety in Control
B.E. in Mechanical and Aerospace Engineering, 2025
Seoul National University
Early Graduation (top 10% of class), 2019
Sejong Science High School
Experience
- Designed a novel 2 degrees of freedom ankle joint mechanism using a compliant mechanism to enable inversion and eversion movements as well as dorsiflexion and plantarflexion.
- Built a prototype using a 3D printer and integrated it with the existing PERL ankle exoskeleton to confirm the mechanism’s performance
- Created a geometric tracking controller for the multirotor with collective pitch-tilting capable of tracking a 5‑variable trajectory consisting of position, yaw, and pitch, which was shown to be differentially flat outputs of the vehicle dynamics.
- Proved the almost global exponential attractiveness of the controlled vehicle dynamics using Lyapunov analysis, and demonstrated the stability using a Matlab numerical simulation.
- Designed an adaptive quadrotor controller by augmenting the geometric tracking controller for the quadrotor with an adaptive control law based on the geodesic distance of the manifold of physically consistent inertial parameters.
- Implemented various LiDAR inertial odometry(LIO) algorithms for quadrotor navigation without GPS.
- Tested the algorithm’s computational and tracking performance using pre‑recorded LiDAR data.
- Performed research on satellites and their payload, specifically focusing on Earth observation satellites and synthetic aperture radar(SAR).
- Worked as an interpreter/translator for the Air Force Operations Command A3, interpreting various operational dialogue between ROK and US air force officers, and translating English USAF documents, doctrines and emails for our ROK members and vice versa.
Projects
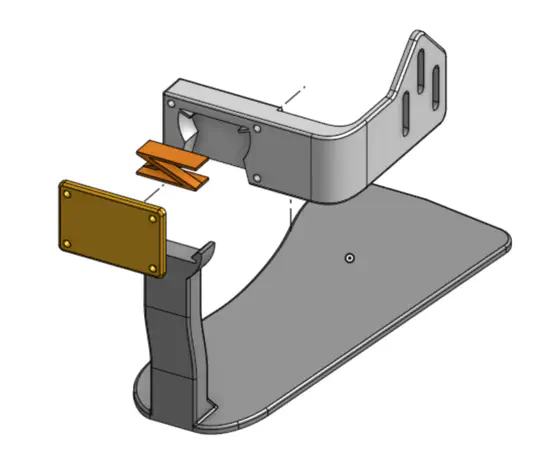
PIEJAM(Passive Inversion and Eversion Joint Ankle Mechanism)
PIEJAM is an inversion and eversion ankle joint mechanism that allows the user to perform ankle inversion and eversion while using an ankle exoskeleton.
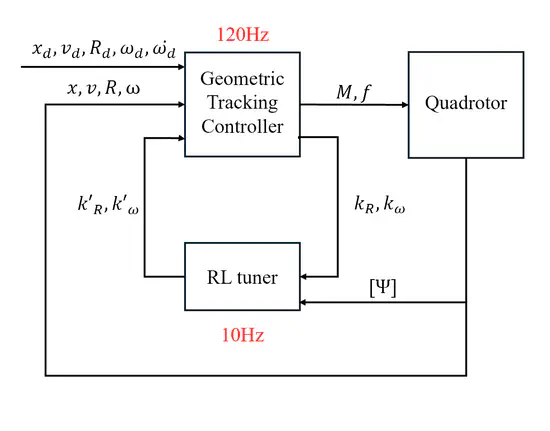
Reinforcement Learning based Tuner for the Geometric Tracking Attitude Controller
A reinforcement learning algorithm designed to tune the attitude controller gains for the geometric tracking controller for the quadrotor.
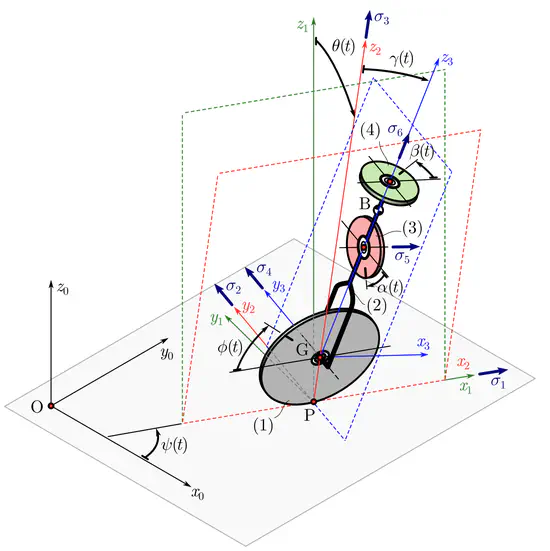
Unicycle Control using Disturbance Observer
Augmented an existing PD controller for a unicycle by adding a disturbance observer inner loop, improving the performance by reducing the overshoot. Implemented and tested the controller in Matlab and Simulink, confirming the performance improvement.
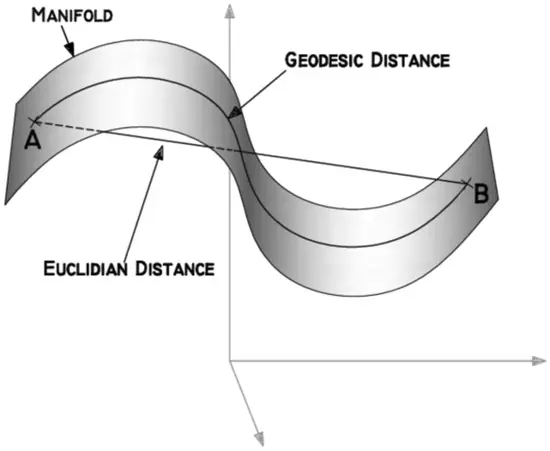
Adaptive Quadrotor Controller
Created an adaptive quadrotor controller by using the geodesic distance of the manifold of physically consistent inertial parameters. The adaptive law was implemented to the geometric tracking controller to create the adaptive quadrotor controller.
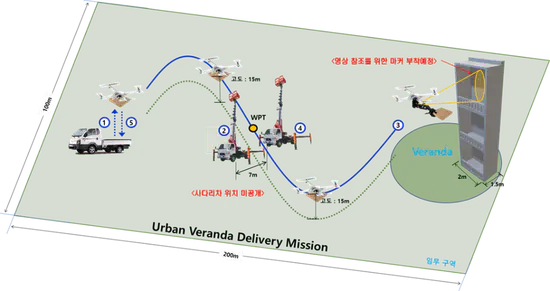
Autonomous Quadrotor System for Payload Delivery
Created an autonomous quadrotor capable of detecting and avoiding obstacles, automatically landing on a designated landing area, detecting a pre‑determined delivery point and delivering a payload to it.
Honors
Publications
Contact
- johnny3357@snu.ac.kr
- Gwanak-ro 1, Gwanak-gu, Seoul 08826